
산업 또는 생활 속에서 작업을 하는 근로자의 경우 중량물을 운반하는 작업이 많으며, 작업 도중 무리한 동작이나 무거운 중량물 취급으로 근골격계 질환으로 연계되는 경우가 많다. 대부분의 근로자들은 중량물 운반을 위한 과정에서 자세가 올바르지 않거나 장시간 반복적인 작업, 고강도 작업을 진행하여 허리 부상을 입는 경우가 많이 발생되고 있다.
지금까지 개발된 대다수의 착용로봇은 허리 근력을 보조하기 위한 액추에이터로 공압, 유압 또는 전기식 모터를 사용하고 있다. 허리 근력을 보조하기 위한 액추에이터로 공압, 유압 또는 전기식 모터를 사용하는 경우 동작성이나 보조력이 명확하다는 장점이 있다. 다만, 시스템을 구성이 복잡하고, 부수적인 장치를 필요로 하기 때문에 크기, 무게, 가격 등에 민감하다.
또한, 액추에이터를 구동하기 위한 배터리의 영향으로 사용 시간이 제한적이며 수동형 액추에이터 보다 유지, 보수가 어렵다는 문제가 있다. 이 외에도 액추에이터가 구성되는 경우 사용자가 보조력 정도를 조절하거나 최대 보조력을 변경하는 것이 어렵기 때문에 범용적이지 않은 한계성을 지닌다.
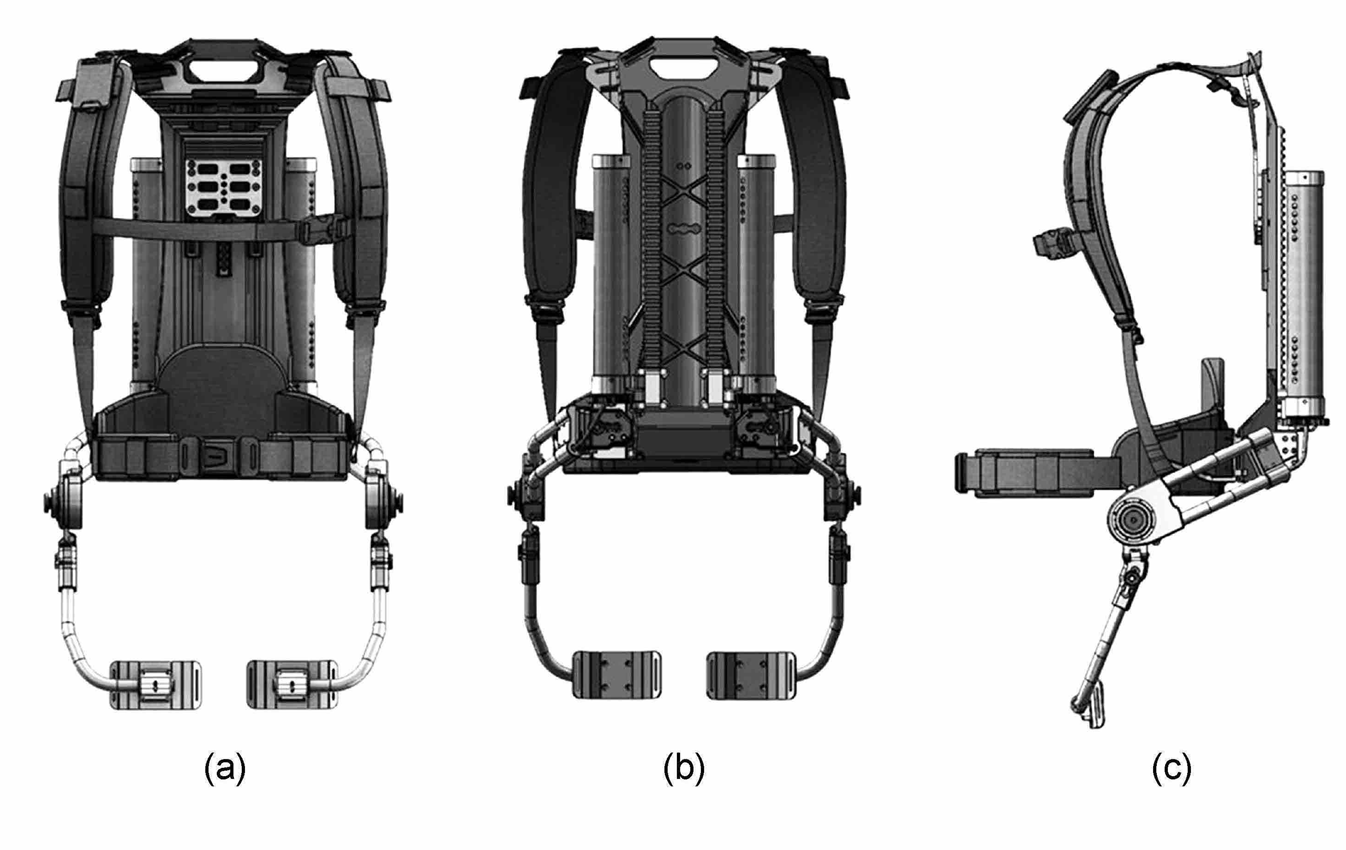
LIG넥스원의 허리 근력 보조용 착용로봇은 스프링을 포함하는 수동형 액추에이터인 실린더를 이용하여 사용자의 허리 근력을 보조할 수 있도록 설계되었다.
클러치부를 이용하여, 프리 스윙과 허리 근력 보조 모드로 구분하여 사용할 수 있다. 프리 스윙 모드는 착용자가 자유롭게 이동이 필요한 경우 근력 보조 없이 자유롭게 움직일 수 있는 상태를 말한다.
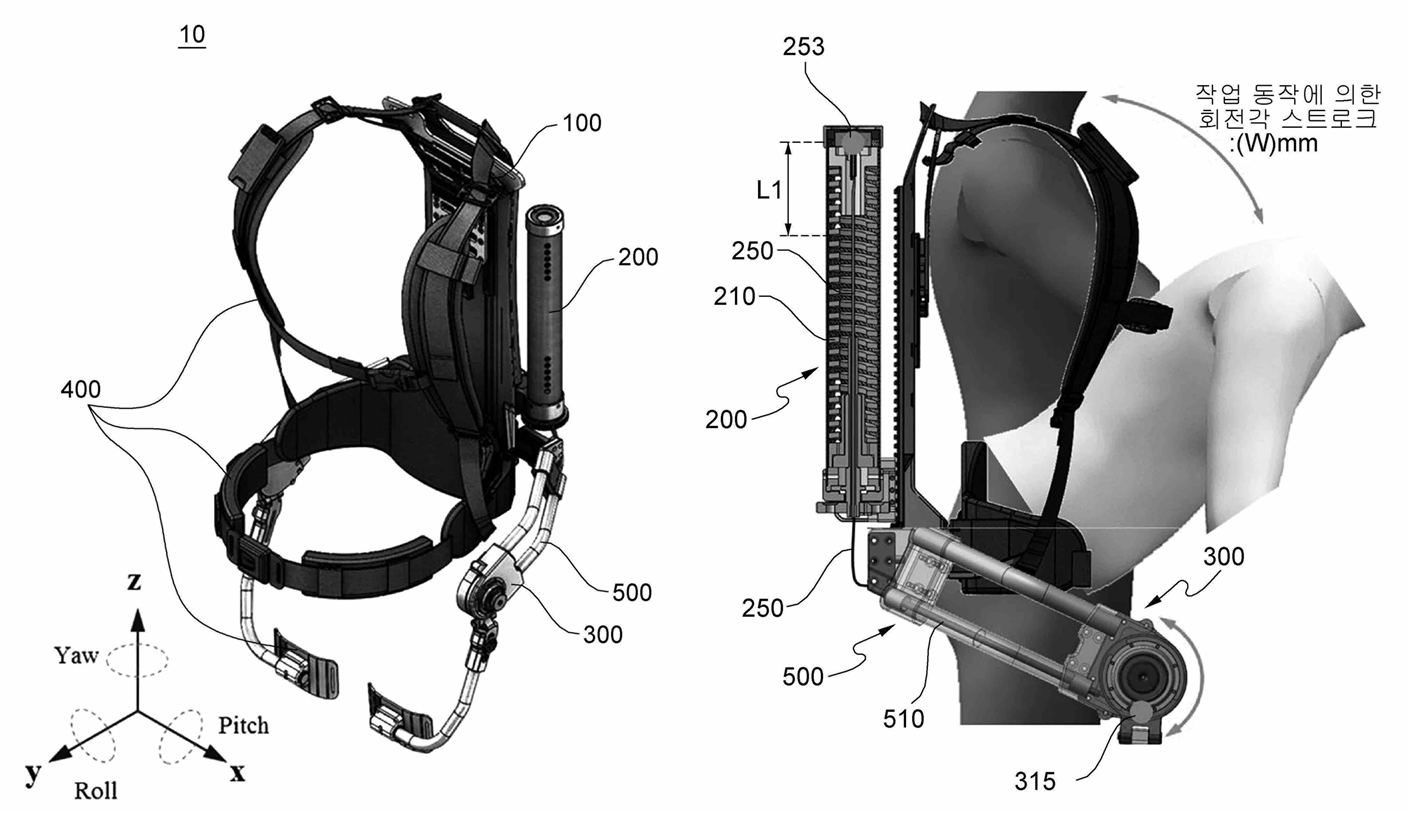
허리 근력 보조 모드는 허리 근력 보조가 필요한 경우 사용하는 모드이다. 클러치의 풀리 모듈과 체결부의 허벅지 기구부를 조립하면 착용자가 허리를 굽혔을 때 스프링 실린더 내부에 포함된 스프링이 압축과 인장을 반복하여 허리 보조력을 발생시킬 수 있다.
출처
- 허리 근력 보조 장치 및 이를 포함하는 착용 로봇(엘아이지넥스원 주식회사, 10-2020-0085382)
의견을 남겨주세요