
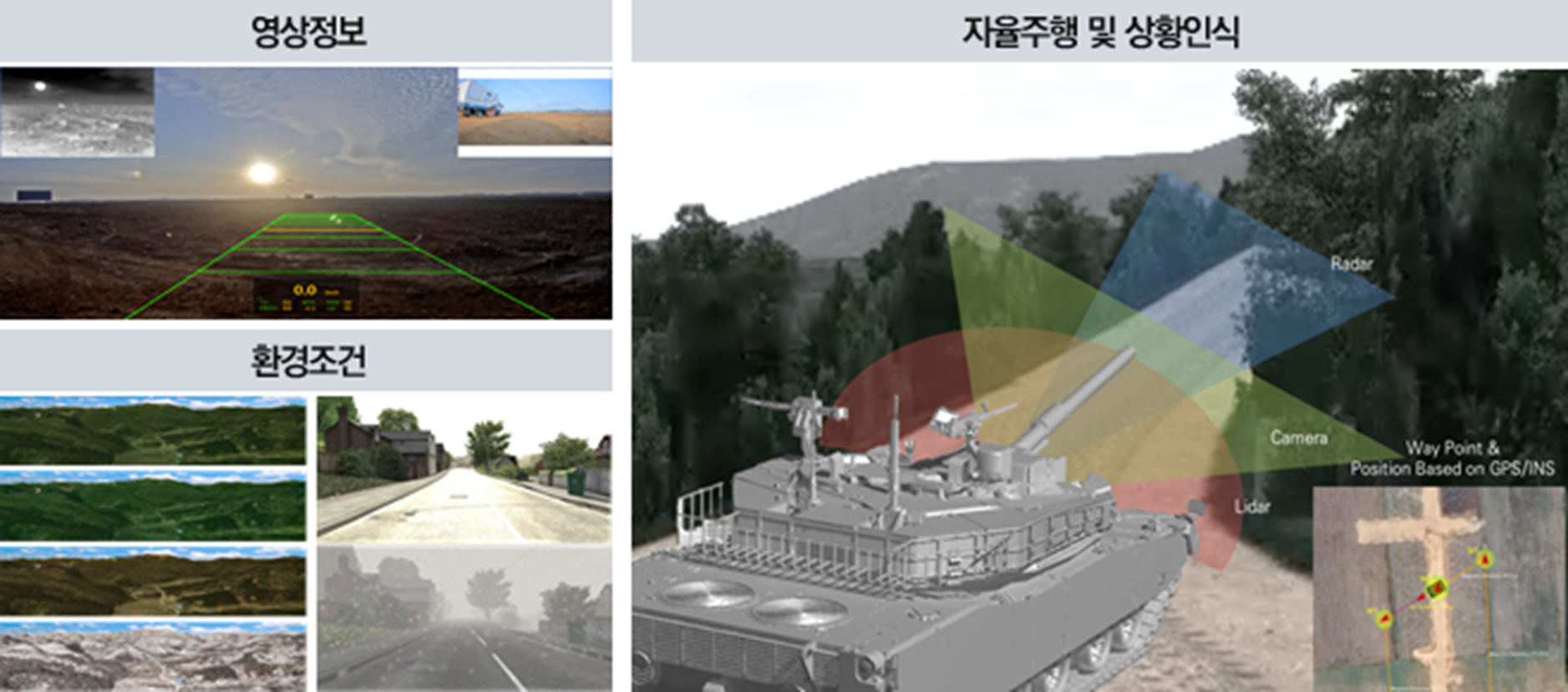
K1전차 원격 무인화('20.12~'24.11) 과제의 환경인식장치 개념도
이동환경 다중표적 추적기술('22.10~'25.09)
현재 지상무인차량에 적용중인 표적처리기술은 플랫폼 정지 상태에서 다중표적 자동탐지/추적을 수행할 수 있는 수준이며, 향후 지상무인차량의 다양한 운용을 위해서는 플랫폼이 이동하는 중에도 다중표적의 자동탐지 및 추적이 가능한 기술이 요구된다. 본 과제는 36개월간 30.6억원을 투자하는 응용연구로, 이동 중에도 다중대역(CCD/IR) 영상을 획득하여 표적을 추출·추적하고, 획득한 표적의 항적을 관리하는 지능형 표적처리기술 개발을 목표로 한다. 응용연구를 통해 확보된 핵심기술은 향후 무인중전투차량 등의 지상무인체계 개발에 활용될 것으로 기대된다.
의견을 남겨주세요