
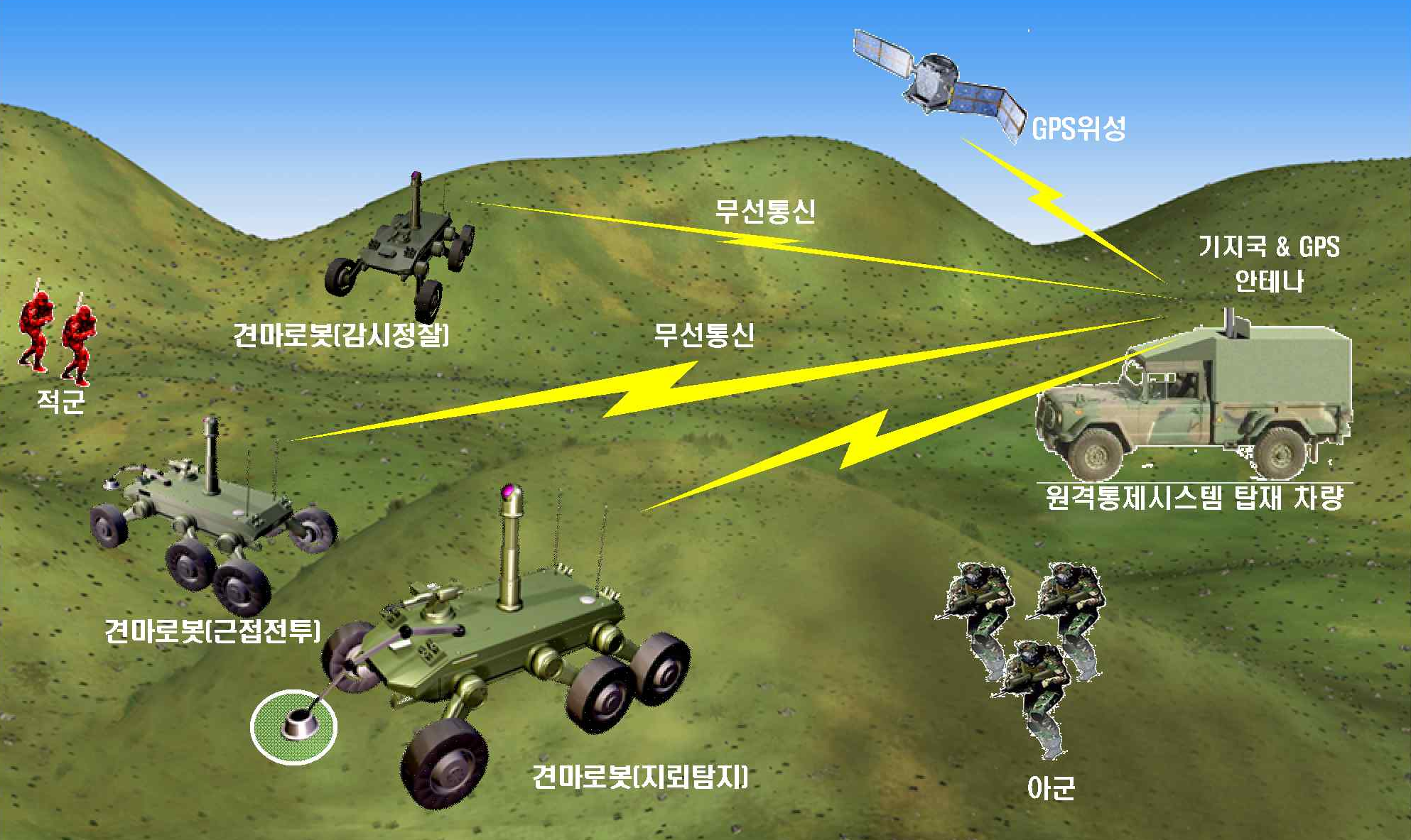
XAV(eXperimental Autonomous Vehicle)를 통해 UGV의 개발 가능성을 확인한 국방부는 2005년 9월 다목적 견마로봇 개발을 확정하였다. 2006년 9월 개발에 착수해 2012년 11월에 완료하였고, 2012년 9월과 10월에 전방 사단에서 전투실험을 실시하여 무인차량의 군 활용 가능성 검토와 개선사항 등을 도출하였다.
XAV(eXperimental Autonomous Vehicle)를 통해 UGV의 개발 가능성을 확인한 국방부는 2005년 9월 다목적 견마로봇 개발을 확정하였다. 2006년 9월 개발에 착수해 2012년 11월에 완료하였고, 2012년 9월과 10월에 전방 사단에서 전투실험을 실시하여 무인차량의 군 활용 가능성 검토와 개선사항 등을 도출하였다.
구독하려면 아래 버튼을 눌러주세요
![]()
![]()
서비스 이용 문의admin@team.maily.so 채팅으로 문의하기
의견을 남겨주세요
팀 뮤직데이터
멤버십 구독자만 읽을 수 있어요
쉘든의 밀리터리
멤버십 구독자만 읽을 수 있어요
의견을 남겨주세요