로봇이라고 하면 어떤 이미지가 머릿속에 떠오르시나요? 건담 같은 인간형 로봇이 떠오르는 사람도 있고, 게임 <호라이즌 시리즈>에 나오는 온갖 동물형 기계를 떠올릴 수도 있고, 가끔은 공장에서 쓰이는 로봇 팔을 생각하는 사람도 있을 겁니다. 아니면 대단히 화제가 되었던 보스턴다이나믹스의 춤추는 로봇을 생각하실지도 모르겠네요. 어쨌든 대부분은 딱딱한 금속과 유압 펌프, 전선과 피스톤 같은 '기계적'인 장치를 생각하실 거예요. 그런데 문어나 가오리처럼, 마치 생물처럼 말랑말랑한 로봇을 상상해 본 적 있나요?
위의 동영상은 2016년 하버드 대학교에서 개발한 '옥토봇(Octobot)'입니다. 단단한 부품이 하나도 없는 최초의 로봇인데요, 동력원이나 제어부, 구동부까지 전부 연성물질(soft matter)을 사용합니다. 실리콘으로 된 말랑말랑한 몸체는 금형으로 찍어냈고, '혈관'과 '뇌'는 3D프린터로 만들었습니다. 건전지를 사용하는 대신 과산화수소를 태우는 화학 반응으로부터 에너지를 얻고, 반도체 칩에 전류를 흘려보내는 대신 미세한 관에 액체를 흘려보내서 어느 다리를 들어올릴지 결정합니다. 할 줄 아는 건 다리를 번갈아 가며 올렸다 내렸다 하는 것뿐이지만, 기계나 전자장치를 전혀 사용하지 않고도 로봇을 움직일 수 있다는 아이디어가 중요한 거니까요.
2021년 3월 3일, 새로운 종류의 소프트 로봇이 발표됐고 무려 과학잡지 <Nature>의 표지를 장식했습니다. 위의 영상에서 보시는 것처럼 날개지느러미 두 개와 꼬리지느러미 한 개가 달린, 마치 가오리처럼 보이는 형상의 로봇입니다. 이 로봇은 심해 탐사를 목적으로 개발되었는데요, 남중국해의 수면 아래 3,200m 지점에서도 유유자적 헤엄칠 수 있었습니다. 심지어 지구상에서 가장 깊은 곳인 해저 10,900m, 마리아나 해구에서도 수압을 견디고 망가지지 않았다고 하네요.
옥토봇과는 달리 이 로봇은 100% 연성물질로만 만들어지지는 않았습니다. 지느러미를 움직이게 하는 인공 근육은 연성물질이 맞지만 동력원은 배터리입니다. 이번 로봇 설계에서 핵심적인 내용은 바로 심해어의 구조를 모방했다는 점인데요, 마리아나 해구의 수심 6,000~8,000m 영역에 서식하는 마리아나 심해 꼼치(Mariana hadal snailfish, Pseudoliparis swirei)가 바로 그 주인공입니다. 이 로봇은 꼼치의 신체구조를 크게 두 가지 방법으로 흉내내고 있어요.
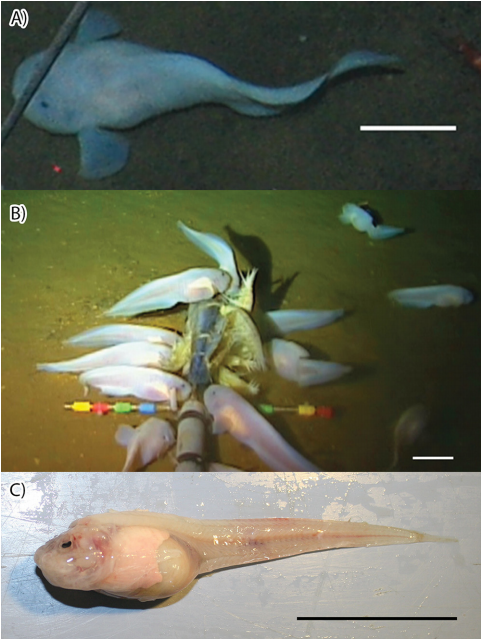
첫 번째는 날개지느러미의 형상입니다. 마리아나 꼼치의 가슴지느러미를 움직이는 근육은 몸체와 지느러미를 연결하는 관절에 붙어 있고, 가슴지느러미 앞쪽의 가느다란 뼈만을 움직여서 지느러미 전체를 움직인다고 합니다. 꼼치 로봇의 날개지느러미도 마찬가지로 인공 근육은 몸체와 날개를 연결하는 관절부에만 붙어서 단단한 날개 앞면을 위아래로 움직이기만 합니다. 그러면 날개에 연결된 얇은 실리콘 피막이 따라서 팔랑거리며 로봇을 전진시키는 거지요.
둘째로, 연구진은 로봇을 제어하는 데 필요한 전자부품과 동력을 공급하는 전지를 실리콘 몸체 내에 여기저기 분산시켰습니다. 마리아나 꼼치의 뼛조각은 부드러운 근육 조직 사이사이에 박혀 있습니다. 뼈처럼 단단한 조직 두 개가 맞닿은 자리는 압력을 가했을 때 부서지기 쉽기 때문입니다. 반면 근육이나 지방처럼 부드러운 조직은 높은 압력을 가하면 변형되기는 해도 쉽게 망가져 버리지는 않습니다. 텅 빈 페트병은 쉽게 찌그러뜨릴 수 있지만 물이나 기름이 가득 찬 페트병은 잘 찌그러지지 않지요? 로봇도 마찬가지여서 변형이 잘 안 되는 전자부품을 한 군데 집중시키는 대신 실리콘 몸체에 분산시켜서 심해의 수압을 더 잘 견디도록 설계했다고 하네요.
과학자들은 왜 소프트 로봇을 연구하는 걸까요? 가장 중요한 이유는 부드러운 물질이 금속에 비해 환경과 상호작용하는 데 유리하기 때문입니다. 예를 들어 심해 탐사용 로봇은 얕은 곳에서 잡히지 않는 특이한 심해어 표본을 채집해 와야 할 텐데, 단단한 금속 팔로 물렁물렁한 생물을 쥐면 다치고 망가지기 쉽습니다. 또한 바위에 부딪히거나 어딘가 걸려서 넘어졌을 때 금속 부속은 의외로 쉽게 고장나지만, 부드러운 부속을 갖고 있으면 아무래도 충격을 더 잘 흡수할 테지요.
소프트 로봇은 아직 걸음마 단계입니다. 옥토봇도 그랬지만, 이번 꼼치 로봇도 객관적인 성능이 대단히 뛰어나지는 않아요. 헤엄치는 속도가 빠른 편도 아니고, 기존에 마리아나 해구까지 내려간 잠수정이 없었던 것도 물론 아니고요. (사실 꼼치 로봇도 쇳덩어리 잠수정에 실려 마리아나 해구로 내려갔습니다) 하지만 모든 기술은 첫 단계에는 기존의 경쟁 기술에 비해 허술해 보이기 마련이지요. 소프트 로봇은 느리지만 분명하게 발전 중이고, 언젠가 우리는 기존의 로봇으로는 할 수 없던 일을 해치우는 소프트 로봇을 보게 될 지도 모릅니다.
댓글
의견을 남겨주세요