
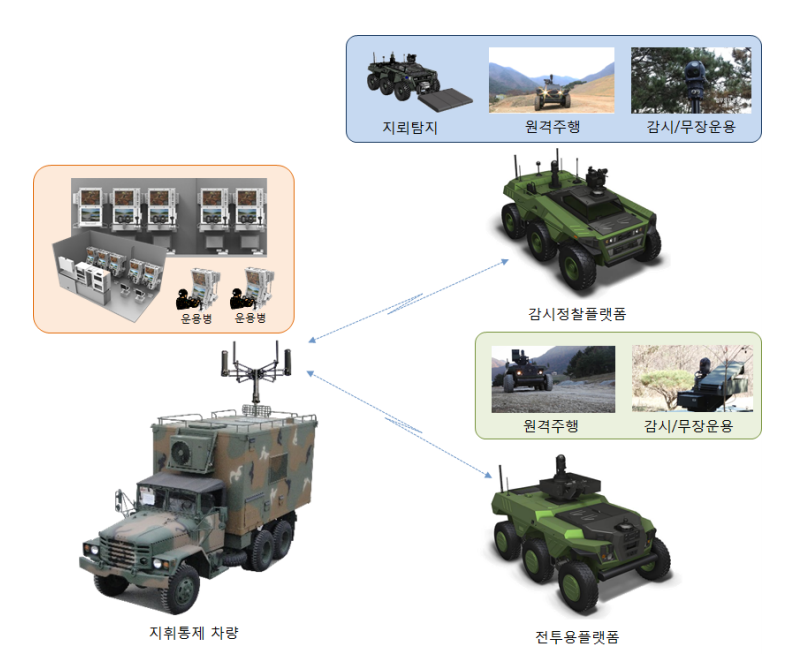
견마형 로봇기술 개발과제를 통해 확보한 UGV 기술을 토대로, 2011년 11월부터 2016년 10월까지 국방과학연구소 주관의 '다중로봇 통합 운용 및 제어기술' 과제를 통해 감시정찰/경전투용 실험플랫폼과 다중로봇 지휘통제체계를 개발하였다. 미래 무인전투체계에 필수적으로 소요되는 기술을 확보하고 감시정찰/경전투용 다중로봇 통합운용 및 제어기술의 실용화 가능성을 입증하였으며, 개발시험평가를 통해 목표성능을 검증하고 기준충족 여부를 확인하였다.
견마형 로봇기술 개발과제를 통해 확보한 UGV 기술을 토대로, 2011년 11월부터 2016년 10월까지 국방과학연구소 주관의 '다중로봇 통합 운용 및 제어기술' 과제를 통해 감시정찰/경전투용 실험플랫폼과 다중로봇 지휘통제체계를 개발하였다. 미래 무인전투체계에 필수적으로 소요되는 기술을 확보하고 감시정찰/경전투용 다중로봇 통합운용 및 제어기술의 실용화 가능성을 입증하였으며, 개발시험평가를 통해 목표성능을 검증하고 기준충족 여부를 확인하였다.
구독하려면 아래 버튼을 눌러주세요
![]()
![]()
서비스 이용 문의admin@team.maily.so 채팅으로 문의하기
의견을 남겨주세요