
대부분의 작업자는 손을 이용하여 물건을 잡고, 팔의 힘에 의존하여 들고 이송하기 때문에, 반복적으로 이를 수행하는 경우 손과 팔에 피로가 집중되고 이를 만회하기 위해 허리 등을 사용하게 되어 상해를 입는 경우가 많았다. 기존의 물류 창고, 자재실 등 작업 환경에서의 작업자는 신체를 보호하기 위한 보호구, 작업 공구 등을 사용했으나, 이는 단순 외피 보호용으로 작업자의 근력을 보조하는 기능이 포함되어 있지 않다.
또한 작업 환경과 중량물에 따라 작업 효율성을 높이기 위해서는 다양한 작업 도구가 필요하고, 단순히 들어올리는 데에만 효율적으로 사용할 수 있으며, 많은 양의 작업을 보조하기 위해서는 수레와 같은 큰 보조기구를 이용하여 작업을 보조했으나 협소한 공간이나 장비, 설비가 들어가기 어려운 작업 환경에서는 활용성이 저하되는 문제가 있다.
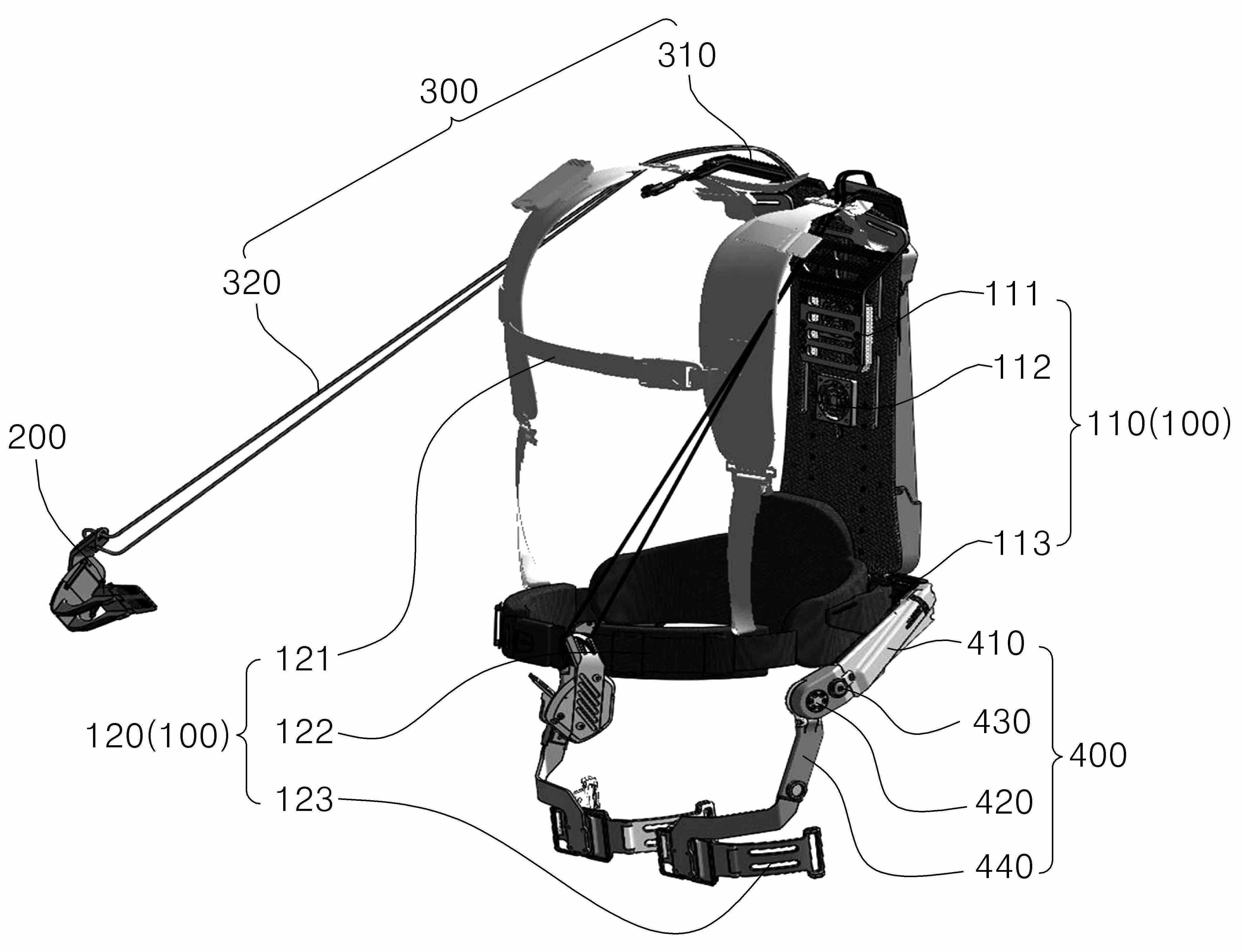
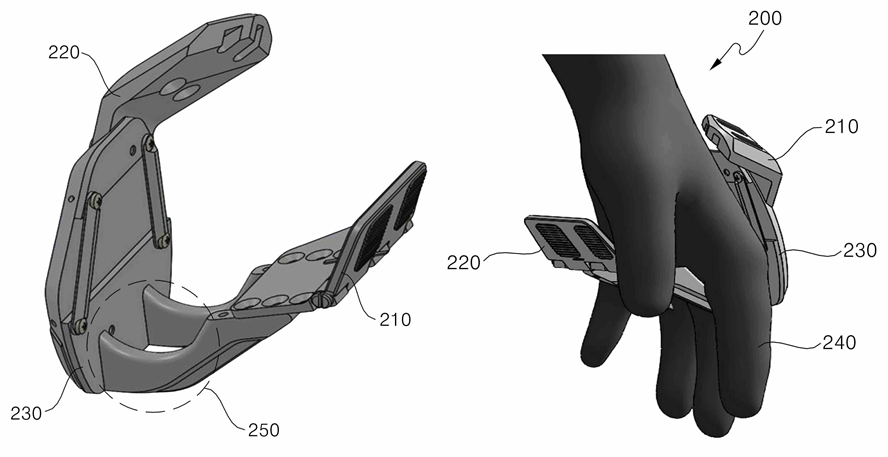
LIG넥스원의 힘 분산형 착용로봇은 사용자가 중량물을 파지할 때 중량물의 하중을 분산시키며, 손가락과 팔, 어깨에 집중되는 부하를 착용자의 신체에 결속되어 있는 부위 전체로 분산시키도록 할 수 있도록 설계되었다.
사용자가 중량물을 들어올리면 와이어가 자동으로 당겨진다. 이때 착용로봇의 무게 중심이 몸체와 등쪽에 위치함에 따라 하중이 어깨를 기점으로 등으로 분산되고, 조립체 연결부를 통해 착용부의 하단과 연결된 다리 기구부 조립체까지 하중을 분산시키게 된다. 이러한 하중 분산을 통해 작업자에게 가해지는 피로도를 낮추어 상해를 예방하고 업무 효율성을 향상시킬 수 있다.
출처
- 힘 분산형 착용로봇(엘아이지넥스원 주식회사, 10-2019-0169777)
의견을 남겨주세요